Description
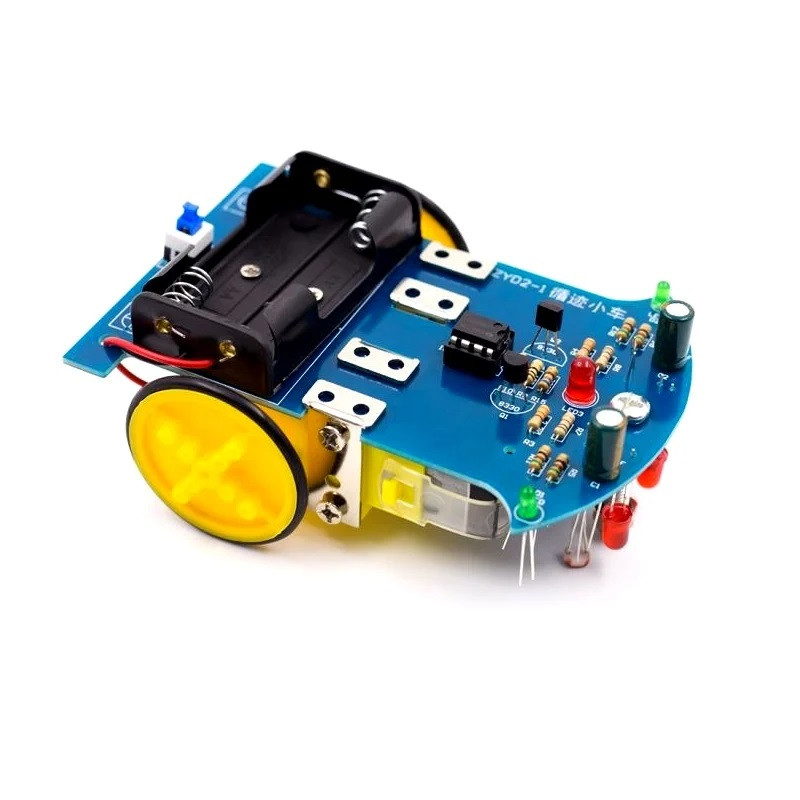
Un robot évitant les obstacles contrôlé par Bluetooth est un projet passionnant et éducatif.
Composants nécessaires :
Carte Arduino
Module Bluetooth ( HC-06)
Capteur ultrasonique (HC-SR04) pour détecter les obstacles
Moteurs à courant continu pour le mouvement
Driver de moteur ( L298N ) pour contrôler les moteurs
Breadboard et fils de connexion
Fonctionnement :
Détection des obstacles : Le capteur ultrasonique envoie des ondes sonores et mesure le temps de retour des échos pour détecter les obstacles.
Contrôle des moteurs : L’Arduino reçoit les données du capteur et ajuste la vitesse et la direction des moteurs pour éviter les obstacles.
Communication Bluetooth : Le module Bluetooth permet de contrôler le robot à distance via une application sur un smartphone.
1 X châssis de véhicule 2WD transparent
1 X capteur de distance à ultrasons (HC-SR04)
1 X support de capteur de distance ultrasonique HC-SR04
1 X Arduino UNO R3 (Clone – Puce USB CH340 – Câble USB en cadeau)
1 X carte de pilote de moteur DC/pas à pas L298N
1 module Bluetooth HC05 (avec broche de sortie)
1 X mini planche
10 X câble de raccordement mâle-mâle (20 cm)
10 X câble de raccordement femelle à mâle (20 cm)