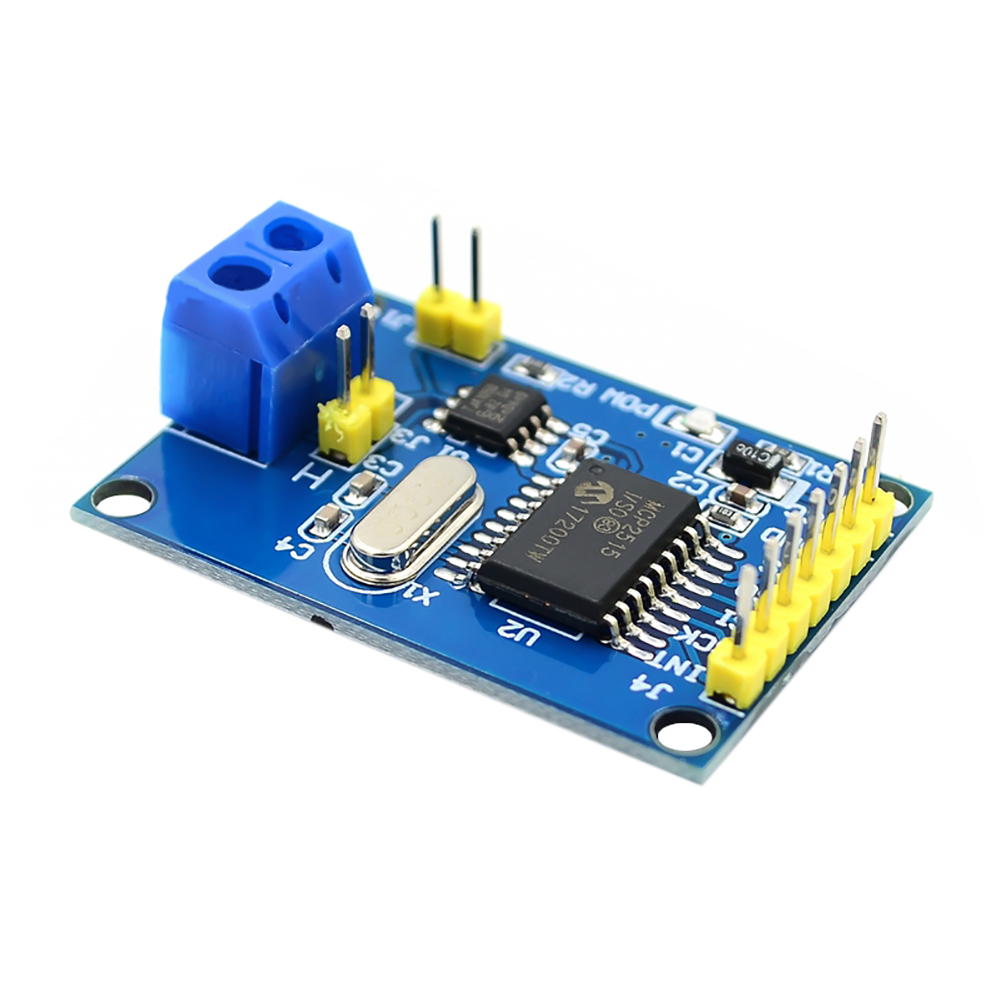
Module de Bus CAN MCP2515 + Récepteur TJA1050 - Interface SPI
Le Module Bus CAN MCP2515 + TJA1050 permet d'établir une communication CAN via l’interface SPI. Il est idéal pour les applications automobiles, industrielles et domotiques, compatible avec Arduino, ESP32, STM32 et autres microcontrôleurs.
Spécifications Techniques
📋 Attributs du Produit :
- Chipset principal : MCP2515 (contrôleur CAN)
- Transceiver : TJA1050 (interface physique)
- Protocole : CAN 2.0B
- Taux de transmission : Jusqu’à 1 Mb/s
- Interface : SPI (MISO, MOSI, SCK, CS)
- Tension d'alimentation : 5V DC
- Compatibilité : Arduino, ESP32, STM32, Raspberry Pi
✅ 1. Points Forts :
✔ Compatible CAN 2.0B – Supporte des vitesses jusqu'à 1 Mb/s
✔ Communication SPI rapide et fiable
✔ Faible consommation d’énergie
✔ Large compatibilité avec Arduino, ESP32, STM32, Raspberry Pi
✔ Idéal pour les projets de communication automobile et industrielle
📌 2. Applications Typiques :
🔹 Réseaux de communication automobile (OBD-II, ECU)
🔹 Systèmes industriels (automatisation, capteurs)
🔹 Domotique et IoT
🔹 Projets robotiques nécessitant une communication CAN
🔹 Contrôle de moteur et d'équipements lourds
🔗 3. Produits Associés :
- Arduino UNO R4 WiFi – Parfait pour contrôler le module
- ESP32-WROOM-32 – Connectivité WiFi/Bluetooth avec bus CAN
- STM32F103C8T6 – Microcontrôleur puissant avec support CAN
- Câbles Dupont – Pour connecter facilement le module
📝 4. Description Longue (Optimisée SEO) :
Le Module Bus CAN MCP2515 + TJA1050 est conçu pour intégrer la communication CAN (Controller Area Network) dans vos projets basés sur Arduino, ESP32, STM32 et Raspberry Pi.
Le MCP2515 est un contrôleur CAN qui gère la communication, tandis que le TJA1050 est un transceiver qui convertit les signaux pour la transmission sur le bus CAN.
💡 Schéma de connexion avec Arduino UNO :
🔹 Utilisation avec la bibliothèque mcp_can.h sous Arduino IDE.
🚨 5. Problèmes et Solutions :
- Problème : L'initialisation du CAN échoue.
Solution : Vérifiez les connexions SPI et l’oscillateur 8 MHz du module. - Problème : Pas de réception de messages.
Solution : Assurez-vous que l'ID du message CAN correspond à celui attendu. - Problème : Communication instable.
Solution : Testez avec différentes vitesses de communication (125Kbps, 250Kbps, 500Kbps, etc.).
❓ 6. FAQ (Questions Fréquemment Posées) :
- Q : Peut-on utiliser ce module pour l’OBD-II ?
R : Oui, mais il nécessite un adaptateur supplémentaire pour la connexion au port OBD-II. - Q : Est-il compatible avec un Raspberry Pi ?
R : Oui, avec la librairiepython-canet un adaptateur SPI. - Q : Quelle est la tension logique des broches ?
R : 5V, utilisez un convertisseur de niveau si nécessaire pour ESP32 (3.3V).
📊 7. Produits Équivalents et Comparaison :
| Modèle | Interface | Vitesse | Compatibilité | Transceiver |
|---|---|---|---|---|
| MCP2515 + TJA1050 (Ce produit) | SPI | 1 Mb/s | Arduino, ESP32, STM32, RPi | TJA1050 |
| SN65HVD230 CAN Module | UART | 1 Mb/s | STM32, ESP32 | SN65HVD230 |
| Arduino MKR CAN Shield | I2C/SPI | 1 Mb/s | Compatible Arduino MKR | Intégré |
🗣️ 8. Avis Clients et Témoignages :
⭐ Amine H. (5/5) : "Excellent module pour mes projets automobiles, fonctionne parfaitement avec Arduino."
⭐ Nabil M. (4.5/5) : "Testé avec un STM32, communication CAN fluide et stable."
⭐ Karim D. (5/5) : "Installation facile, bon rapport qualité/prix !"









